EDU19 Servos

|
Použití: RC Auta, robotická ramena, chytré zámky Mikrokontrolér: ESP32 S3 mini |
Popis
Servo motor je elektrický motor, který se dokáže přesně otáčet na určitou pozici a tu udržet. Neotáčí se volně dokola jako běžný motor, ale jen do určitého úhlu – například od 0° do 180°.
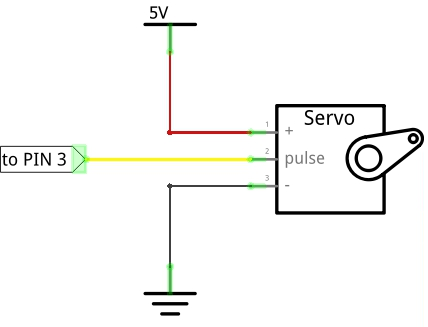
Zapojení
Značka
Ukázkový kód
#include <ESP32Servo.h>
Servo myServo;
const int servoPin = 8; // Pin pro servo (GPIO 8)
const int potPin = 11; // Pin pro potenciometr (GPIO 11)
void setup() {
Serial.begin(115200);
// Nastavení PWM parametru pro servo
myServo.setPeriodHertz(50); // 50 Hz pro serva
myServo.attach(servoPin, 500, 2400); // Nastavení minimálního a maximálního pulzu (v mikrosekundách)
Serial.println("Servo řízení spuštěno...");
}
void loop() {
int potValue = analogRead(potPin); // Čtení potenciometru (0–4095)
int angle = map(potValue, 0, 4095, 180, 0); // Převod na úhel mezi 0 a 180 stupni
myServo.write(angle); // Nastavení polohy serva
Serial.print("Pot: ");
Serial.print(potValue);
Serial.print(" -> Úhel: ");
Serial.println(angle);
delay(15); // Krátké zpoždění pro stabilitu
}